


Contrôleur de vol 2S Mini F411 16*16mm OSD/BEC intégré
Catégorie de produit : Accessoires électroniques pour jouets
Catégorie de jouet : jouet électrique
Instructions de contrôle de vol du F411
Instructions d'utilisation (lecture obligatoire)
Il existe de nombreuses fonctions d'intégration des commandes de vol et des composants denses. N'utilisez pas d'outils (tels que des pinces à bec effilé ou des manchons) pour visser les écrous lors de l'installation. Cela pourrait endommager inutilement la visserie de la tour. La méthode correcte consiste à appuyer fermement sur l'écrou avec les doigts ; le tournevis permet de serrer rapidement la vis par le bas. (Attention à ne pas trop serrer pour ne pas endommager le circuit imprimé.)
N'installez pas l'hélice lors de l'installation et de la mise en service des commandes de vol. Avant d'installer l'hélice pour un vol d'essai, vérifiez à nouveau la direction du moteur et le sens de rotation de l'hélice. N'utilisez pas de colonne en aluminium ou en nylon non d'origine afin d'éviter d'endommager le matériel des commandes de vol. La norme officielle est une colonne en nylon sur mesure, adaptée à la tour de contrôle.
Avant de mettre l'avion sous tension, vérifiez à nouveau le montage entre les inserts de la tour de vol (alignement des broches ou des fils requis), vérifiez à nouveau que les pôles positifs et négatifs sont correctement soudés et que les vis du moteur sont bien en contact avec le stator afin d'éviter tout court-circuit. Vérifiez également que les composants électroniques de la tour de vol n'ont pas été éjectés de la soudure, ce qui pourrait provoquer un court-circuit. En cas de court-circuit lors de la soudure de l'installation, l'acheteur en assumera la responsabilité.
Paramètres de spécification :
Dimensions : 20*20MM,
Distance du trou de fixation de la vis : 16*16MM, distance du trou : M2
Taille du paquet : 37*34*18mm
Poids : 3 g Poids de l'emballage : 7,5 g
Configuration de base :
Capteur : accéléromètre à trois axes/gyroscope à trois axes MPU6000 (connexion SPI)
Processeur : STM32F411C
Alimentation : entrée batterie 2S
Intégration : LED_STRIP, OSD
BEC : 5 V/0,5 A
Filtre LC intégré, prise en charge du micrologiciel BF (micrologiciel F411)
Buzzer/LED de programmation/Surveillance de tension/Programmation de modulation BLHELI ;
Configuration du récepteur :
Prise en charge de l'interface Sbus ou série RX, Spektrum 1024/2048, SBUS, IBUS, PPM, etc.
1, entrée récepteur DSM, IBUS, SUBS, veuillez configurer RX1 comme interface d'entrée.
2, le récepteur PPM n'a pas besoin de configurer le port UART.
Convient pour le cadre de la machine de déplacement : la taille du cadre suivant dans les 70 mm est appropriée (le cadre de 70 mm peut jouer un petit mais plein avantage fonctionnel)
Caractéristiques:
Petite taille (la taille externe est de seulement 20*20 mm), intégrée avec une lumière LED de couleur réglable, câblage simple et pratique







Catégories de produits
-

Tour volante 2S10AF4 2S 4-en-1 électrique F411 mi...
-

Circuit imprimé multicouche à quatre couches, nivellement à air chaud
-

35A F405 mini DJI Fly tour 2-6S FPV crossover ...
-
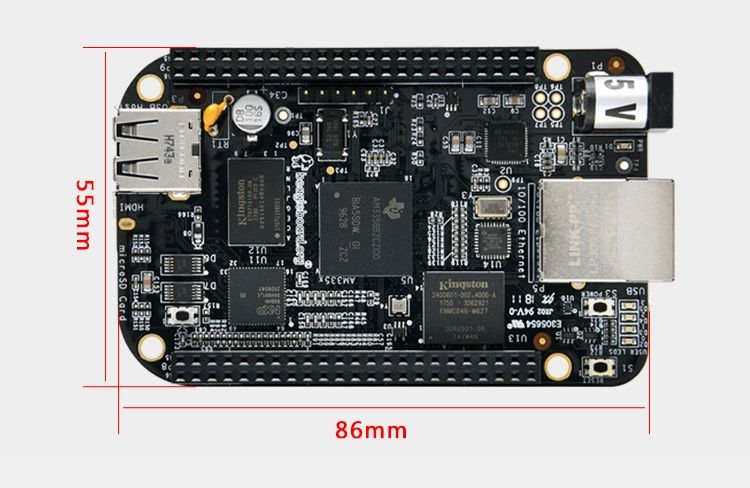
Beaglebone AI BB noir C Industriel SANS FIL Bl...
-

Connecteur de lumière LED rechargeable PCBA de fabrication OEM...
-
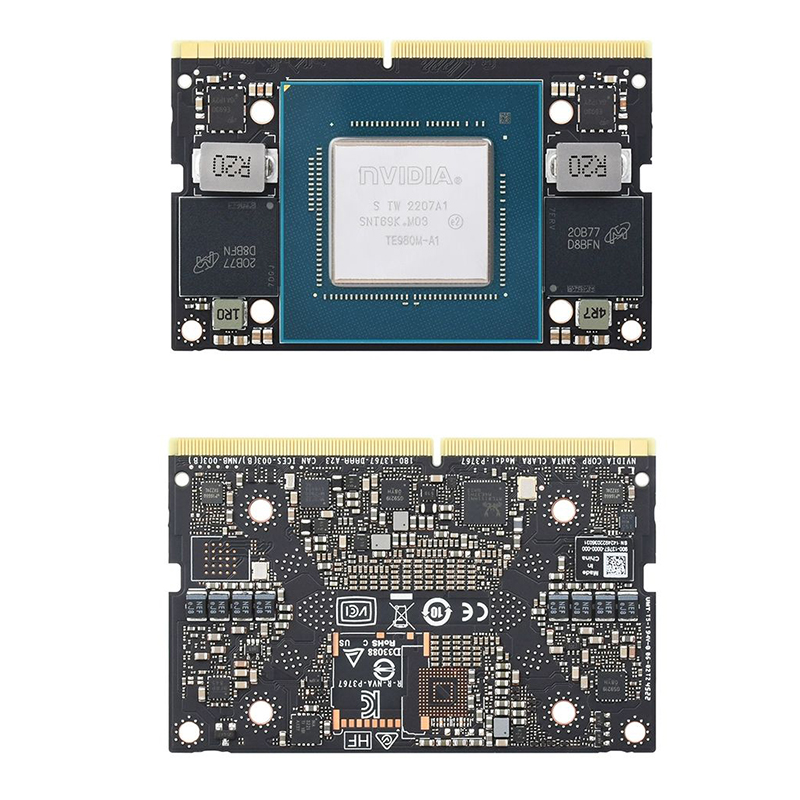
Carte mère NVIDIA Jetson Orin NX, module 16 Go AI...
-

Téléphone
-

E-mail
-

WhatsApp
-

Skype
-

Skype
-

Skype